top of page

Members


Mechanics & Mechatronics Research
The aim of creating this website is to share the academic and research outcomes of us (S.A. Moezi & E. Zakeri) during our academic and research careers. We hope that the contents of the website are of the other researchers' help and assist their precious research efforts in the engineers' society.
.jpg)
SMAS Robotic Arm
Seyed Alireza Moezi
This six-degree-of-freedom robot was fabricated based on the AR robotic manipulator design for the Smart Materials and Adaptive Structures Lab in the second year of my Ph.D. study at Concordia University. This robot, which can carry up to 2 kg of payload and is equipped with six rotary encoders, will be used to actuate the soft magnetic robots developed for my Ph.D. research.
2021-2021
Completed
.jpg)
Vibrating Sample Magnetometer
Seyed Alireza Moezi
A vibrating sample magnetometer is a scientific instrument that measures materials’ magnetic properties based on Faraday’s Law of Induction. The idea of the fabrication of the VSM machine came to my mind when I joined Concordia University for Ph.D. in Mechanical Engineering. Since the topic of my doctoral thesis is associated with magnetic soft robots, I needed this device to measure the magnetic properties of the fabricated robots for modeling and simulation purposes. Considering that the price of this machine was at least over 160,000 (CAD) and Concordia University was not equipped with this device, I fabricated it in about two to three months at the cost of about 10,000 (CAD) with high quality. This idea saved tens of thousands of dollars and helped me continue my research. The fabricated machine has the following specifications. (1) Real-Time field control system with very low noise field control, (2) High signal-to-noise-ratio, (3) High accuracy and repeatability at a constant temperature, (4) This VSM machine can reach fields up to 1.6 T, (5) Rotatable sample holder to ease magnetic properties measurements of the sample at desired angles, (6) Equipped with a high-resolution gaussmeter to measure the real magnetic field surrounding the sample, (7) Dedicated software to record the measurement data online for analysis.
2021-2021
Completed
.png)
Diagnostic Software for Neuromuscular Diseases
Seyed Alireza Moezi
The developed software, programmed using Visual Basic (VB) language, uses data such as patient history and raw electromyography (EMG) data for the diagnosis process. Due to the wide range of these diseases on the one hand and the overlapping of EMG results, on the other hand, the diagnosis of the disease may be associated with errors. Therefore, this software can help the physician in diagnosing or identifying a list of possible illnesses. The software also records the patient’s medical records and physician’s information. In addition to the abovementioned factors, the software reports each neuromuscular disease’s prevalence among patients referred to the treatment center.
2016-2017
Completed
.jpg)
Ouad-rotor - Underwater Robot (Conceptual Model)
Ehsan Zakeri, Syed Alireza Moezi
The idea behind this project was to design a novel type of multi-rotor underwater robots by taking advantage of a new and effective arrangement of eight propulsions. This type of mini low-height underwater robot was inspired by Zakeri master’s thesis (a mini unmanned underwater vehicle equipped with a new arrangement of waterjet propulsions). However, due to the lack of required equipment and facilities, this idea did not come into reality and only the schematic of the robot is designed by using SOLIDWORK software.
2018-2019
Completed
.jpg)
Electro-pneumatic Delta Robot (Constructing and Controlling)
Seyed Alireza Moezi, Ehsan Zakeri
In this project, motivated by Moezi master’s thesis (Design an appropriate controller for the path tracking of a parallel planar manipulator), a new type of parallel Delta Robot equipped with three electro-pneumatic actuators is designed and constructed. These electro-pneumatic actuators take advantage of six 2-3 fast on/off solenoid valves, which enjoy from several advantages such as being inexpensive, faster response, smaller dimension, lower weight, and simpler structure compared to the proportional one. Indeed, the main purpose of designing such a spatial robot is to perform a precise and fast desired path tracking by its end-effector which entails the design of an effective controller. Accordingly, the application of different types of Pulse Width Modulation (PWM) based controllers, such as a PID controller and different types of Advanced Sliding Mode Controllers, for this spatial system is examined.
2016-2018
Completed
.png)
Single and Double Inverted Pendulum (Constructing and Controlling)
Ehsan Zakeri, Seyed Alireza Moezi
In this project, the design and analysis of different types of control algorithms such as PID controller and Different types of Sliding Mode Controllers for under-actuated systems including Single Inverted Pendulum and Double Inverted Pendulum are conducted. To do so, a cart-pole type inverted pendulum, extendable to double or even triple inverted pendulum, in which a DC motor, through a timing belt, transforms the torque into the force and then applies it to the cart is designed and constructed with the aim of performing some experimental tests. The position of the cart, as well as the rotation angle of the pendulum, are measured using two optical rotary encoders; they are the output of the system. The MATLAB Simulink Real-Time software is used to apply the proposed control strategies to the device.
2016-2018
Completed
.jpg)
Ball and Beam (Constructing and Controlling)
Seyed Alireza Moezi, Ehsan Zakeri
The purpose of this project is to design and analyze the application of different types of control algorithms such as PID controller and different types of Sliding Mode Controllers to an under-actuated ball and beam system, experimentally. In the constructed ball and beam setup, a disk attached to the shaft of a DC motor is connected to the beam through a rod, which can adjust the beam orientation by changing the shaft angle. The DC motor shaft angle is measured by a potentiometer connected to it. The position of the ball is determined by two Nickel-Chromium resistance wires which the ball moves on them. The orientation angle of the beam is obtained indirectly from the motor shaft angle. The MATLAB Simulink Real-Time software is used to apply the control methods to the device.
2016-2018
Completed
.jpg)
Ball and Plate (Constructing and Controlling)
Seyed Alireza Moezi, Ehsan Zakeri
This project deals with the design and analysis of the application of different types of control algorithms such as PID controller and different type of Sliding Mode Controllers to the multi-body dynamic systems such as Ball and Plate. Accordingly, a setup of Ball and Plate is constructed to set the stage for experimental tests. This setup uses two servomotors, MG995 Power Pro, to adjust the plate rotation angles around the longitudinal, x, and lateral, y, axes. The ball position is determined by a digital camera, OV 2710, placed right above the plate. The process of locating the ball on the surface using the image processing technique. All operations such as image processing and controller output calculation are carried out in MATLAB- Simulink software. The amount of the controller output is transferred to an Arduino Mega 2560 microcontroller to calculate the proper commands to be sent to the servomotors to adjust their angles.
2016-2018
Completed
.png)
Ball & Aerobeam (Constructing and Controlling)
Ehsan Zakeri, Seyed Alireza Moezi
The aim of this project is to design and analyze of different type of control algorithms such as PID controller, Different type of Sliding Mode Controller, Backstepping Technique, and Feedback linearization method for under-actuated systems. This device, in which a brushless motor, through a propeller, exerts the produced force to the beam. The orientation angle of the beam is obtained from the equipped IMU sensor. The position of the ball is determined by two Nickel-Chromium resistance wires which the ball moves on them. All operations are carried out in MATLAB- Simulink software.
2015-2016
Completed
.jpg)
Vehicle Active Suspension System
Ehsan Zakeri, Seyed Alireza Moezi
In this project, which is an assignment for the Enhanced Automatic Control course, the design and control of an active suspension of an automobile is carried out. All physical parts of the suspension system are designed by SOLIDWORKS software. Also, using the Mechatronic Plugin of the ADAMS software, the sensors and actuators signals are available in the MATLAB-SIMULINK Software. As a result, simulation of controlling the suspension of the vehicle in the ADAMS through MATLAB-SIMULINK is possible. To control the state of the vehicle, a PID controller is employed.
2015
Completed
.png)
3-RPR Pneumatic Parallel Robot (Design, Modeling and Control, Construction, and Path Planning)
Seyed Alireza Moezi, Dr. Mansour Rafeeyan, Dr. Saeed Ebrahimi
In this project, dynamic modeling, control, design, and construction of the 3-RPR parallel robot are investigated. Based on the Lagrange equations method, the equations of motion of the robot are derived in both cases of rigid and flexible intermediate links. In this study, for controlling 3-RPR robot, the feedback linearization and the sliding mode controllers are selected. Also, in order to control this robot, a quantitative feedback theory (QFT), for which the relations are expressed in the frequency domain, is used. Then, the end-effector of the robot is controlled on the short and smooth path in the presence of numerous obstacles, which are produced by the Modified Cuckoo Optimization Algorithm. To verify the equations of motion and also the control laws, the robot is simulated in Adams and Simmechanics software. To validate the simulation results, an experimental setup is designed and constructed. In order to communicate with the experimental model of the robot, a graphical software is also designed and developed. Finally, a robust optimal fuzzy and PID controllers based on the Pulse Width Modulation (PWM) technique are proposed to control a laboratory parallel robot using inexpensive on/off solenoid valves.
2013-2015
Completed
.png)
Simulation of V6 Engine (Modeling and Analysis)
Seyed Alireza Moezi, Ehsan Zakeri
This is project of Mechanical Engineering Design II course. In this study, V6 Engine is designed and simulated in SolidWorks software. Also, the components of this engine including connecting rod, piston, and crankshaft are analyzed in Ansys software.
2011
Completed
.jpg)
Underwater Robot Equipped With Waterjet Propulsion (Design, Modeling and Control, Construction, and Path Planning)
Ehsan Zakeri, Prof. Said Farahat
This project deals with designing and constructing a new type of underwater robot equipped with six waterjet propulsion. Using waterjet propulsions has several advantages compared to the conventional propeller ones such as producing lower noise, faster response to the controller command, producing no undesirable torque, and implementing an effective arrangement of propulsions. The proposed underwater robot in this research enjoys from two water pump and six servo valves with a proper arrangement of guided waterjet output in order to be controllable in its six degrees of freedom. In order to control this underwater robot a wide range of different methods such as PID, Fuzzy logic, Quantitive Feedback Theory, and Sliding Mode, is employed. Furthermore, in addition to performing a number of simulation tests, several experimental tests are carried out to illustrate the robot prototype capabilities and examine the performance of applied controllers.
2013-2015
Completed
.png)
Puma 560 Serial Robot (Simulation and Control - MATLAB-SimMechanics)
Ehsan Zakeri, Seyed Alireza Moezi
In this project, which is an assignment for the course of Robotics, the design and control of a 6-DOF serial robot named PUMA 560 is carried out. All physical parts of the robot are designed by SOLIDWORKS software. Also, using the SimMechanics Plugin of the MATLAB software, the sensors and actuators signals are available in the MATLAB-SIMULINK Software. As a result, simulation of controlling the PUMA 560 robot in MATLAB-SIMULINK is conduced. To control the state of the system, a Feedback linearization controller and Kalman filter observer are employed.
2014
Completed
.jpg)
W-16 Engine (Modeling and Analysis)
Ehsan Zakeri, Seyed Alireza Moezi
This is project of Mechanical Engineering Design II course. In this study, W16 Engine is designed and simulated in SolidWorks software. Also, the components of this engine including connecting rod, piston, and crankshaft are analyzed in ANSYS software.
2011
Completed
.png)
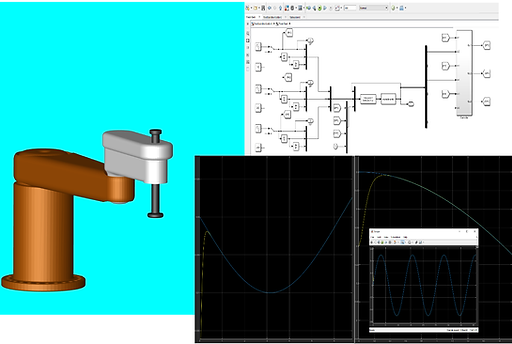
Scara Serial Robot (Simulation and Control - MATLAB-SimMechanics)
Seyed Alireza Moezi, Ehsan Zakeri
In this project, which is an assignment for the course of Robotics, the design and control of a 3-DOF serial robot named Scara is carried out. All physical parts of the robot are designed by SOLIDWORKS software. Also, using the SimMechanics Plugin of the MATLAB software, the sensors and actuators signals are available in the MATLAB-SIMULINK Software. As a result, simulation of controlling the Scara robot in MATLAB-SIMULINK is conduced. To control the state of the system, a Feedback linearization controller is employed.
2014
Completed
Projects
bottom of page